Creato un mini robot che svela i segreti dello scarabeo rinoceronte e imita la sua capacità di volo unica


Katya da Mosca, Russia - Wikimedia commons - CC BY-SA 2.0
Un team di ricercatori si è ispirato al coleottero rinoceronte per realizzare un minuscolo robot imitando alcune delle sue più straordinarie caratteristiche di volo.
L'apertura alare passiva dello scarabeo rinoceronte
In natura esiste un insetto chiamato scarabeo rinoceronte, il cui volo ha una particolarità che possiamo definire "speciale": può dispiegare e chiudere le ali posteriori senza l'ausilio dei muscoli. Una caratteristica che solo questa creatura possiede e che ha catturato l'attenzione di un team internazionale di ricercatori, i quali hanno voluto realizzare un microrobot capace di sbattere le ali come lo scarabeo rinoceronte, imitando la medesima apertura passiva delle ali.
L'obiettivo? Dimostrare che questa modalità unica può produrre un modello di volo controllato e con un'elevata stabilità. Per dar vita al progetto, i ricercatori hanno osservato gli insetti Allomyrina dichotoma in volo e filmato i loro movimenti al rallentatore mediante apposite telecamere sincronizzate ad alta velocità. A quel punto, hanno creato il mini robot in grado di aprire e ritrarre le ali con la stessa tecnica.
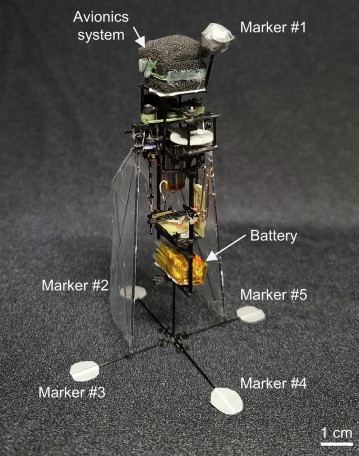
Il micro robot replica la tecnica di volo del rinoceronte alato
nature
Attraverso lo studio, il team ha scoperto che il coleottero rinoceronte sfrutta l'energia elastica e la forza del battito per allargare passivamente le ali posteriori durante il volo, mentre per ritrarle utilizza le dure e robuste ali anteriori, dette elitre, anziché i muscoli del torace. Sulla base di queste informazioni, i ricercatori hanno replicato lo stesso modus operandi nel micro robot, imitando con successo non solo l'estensione alare nella fase del decollo, ma anche il volo a mezz'aria stazionario e la retrazione delle ali nel momento dell'atterraggio o in vista di una collisione.
Questi risultati, secondo il team, arricchiscono la nostra conoscenza sulla modalità di volo degli insetti alati e aprono la strada alla creazione di robot di micro dimensioni. Le ali, per questi esseri viventi, sono indispensabili per una moltitudine di attività vitali, come la ricerca di cibo e la fuga dai predatori. Tali strumenti sono molto delicati, ma allo stesso tempo fondamentali e vanno quindi protetti: per riuscirci, numerosi insetti le ripiegano verso il corpo, evitando così possibili danni nei momenti in cui il volo non è previsto.
La forza centrifuga delle ali è il segreto del rinoceronte alato
Ricerche precedenti ritenevano che il dispiegamento e la ritrazione delle ali nei rinoceronti alati fossero regolati dai muscoli, ma non era mai stato dimostrato. Difatti, questo coleottero apre le ali in due distinti momenti: nel primo, le elitre sono del tutto sollevate e subito dopo si verifica l'apertura parziale delle ali posteriori, che sembra determinata dall'energia elastica incamerata piuttosto che dall'uso muscolare.
In un secondo momento, le quattro ali sbattono in sincronia, con una completa apertura delle ali posteriori. Secondo il team, la forza centrifuga del battito favorisce l'apertura passiva delle ali posteriori. Il micro robot ha convalidato queste considerazioni ed è stato dotato di un tendine elastico che agevola la chiusura e l'apertura alare che si innesca durante il battito delle ali. Grazie a questo modello, è stato possibile dimostrare che la forza centrifuga prodotta dal battito alare basta da sola a sollevare le ali.